



微纳操作机器人实验室(Robotic Micro-nano Operation Laboratory)隶属南开大学人工智能学院机器人与信息自动化研究所。 实验室长期从事微纳操作机器人系统研发及应用研究,研究领域为机器人技术与生命科学的交叉区域。
实验室成功研发面向生命科学的显微分析与操作仪,面向脑科学的机器人化膜片钳系统, 面向自动化核移植的显微操作机器人,自动化模式动物行为学观测系统等多套国内乃至国际领先的自动化显微操作与观测系统, 获得了世界首批机器人操作克隆动物,入围2018和2023年中国智能制造十大科技进展,2022年天津市技术发明特等奖等多项在国内外具有重要影响的成果, 相关研究获得了央视、人民网等海内外权威媒体的广泛报道。
研究方向
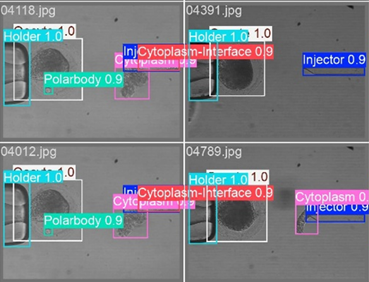
自从“多莉”羊诞生之后,细胞核移植(克隆)技术因其在动物育种、器官移植、基因治疗和濒危物种保护等领域的巨大应用价值,已成为21世纪各国的研究热点。然而,目前手动核移植操作的细胞转动和去核过程对卵母细胞的伤害极大,大大降低了克隆胚胎的发育潜力,造成了目前核移植操作极低的成功率。项目组进行了最小拨动力的细胞转动,基于细胞形变建模的细胞朝向选择和无染色的细胞精准去核...
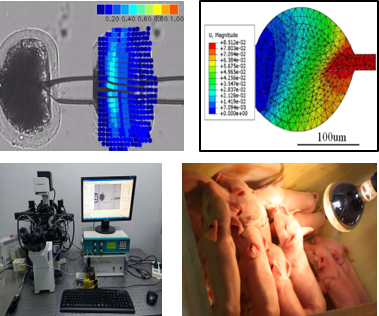
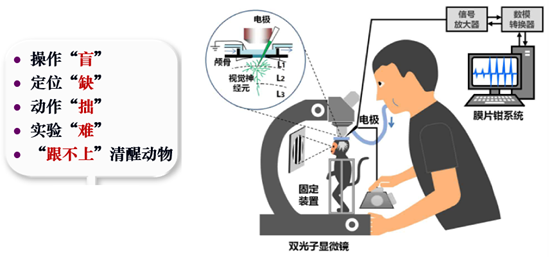
脑科学是寻求人或动物神智活动的细胞及分子层次生物机制的科学。膜片钳操作通过使用微米级的电极微管吸附脑神经细胞表面,将平方微米级的细胞膜吸入微管,使其与管壁形成G欧姆级的高电阻封接(高阻封接),对环境电磁噪声进行有效屏蔽,从而对膜片上离子通道的开关产生的皮安级(10^-12A)电流进行检测,被誉为脑科学离子通道研究的“金标准”。人工膜片钳操作因操作难度大,操作成功率低...
微操作技术是指在微观尺度上(通常为微米或亚微米级别)对样本进行精确操作的技术,近年来,微操作技术在生命科学研究中发挥着越来越重要的作用。传统人工操作方法存在操作者依赖性强、通量低且重复性差等问题,难以满足现代生命科学研究对大规模样本处理的需求。为此,课题组开展了基于显微视觉的微操作机器人研究,实现了多种生命科学显微操作的自动化。
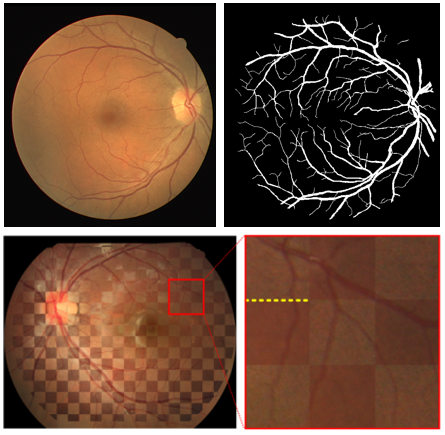
在人口老龄化加剧与近视低龄化的双重挑战下,视觉健康研究已成为全球公共卫生的重要课题。课题组在眼底图像分割算法、近视发生发展的评估与预测两方面展开研究,提出了面向血管连续性的视网膜图像分割算法、面向近视发展的视网膜图像配准方法、基于深度学习的近视发生发展识别及表征方法等,受到医生与医学研究者的关注。
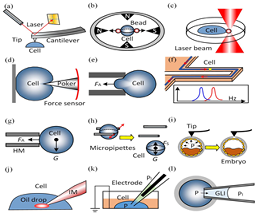
细胞的内环境是维持细胞正常生命活动和生理功能的保障,相对细胞内结构和化学成分的广泛研究, 针对细胞内环境物理参数的测量相对较少,依赖于专门仪器,且每种仪器通常只能测量一个参数。 课题组利用微操作机器人系统首次实现了细胞重量、弹性和内压的三参数原位测量, 为量化和解耦以上三参数在对细胞/胚胎成熟发育过程的调节作用奠定了基础。
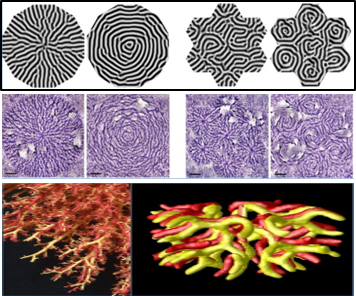
生物系统建模与仿真旨在以计算机仿真为手段,通过对生物系统建模, 模拟生物模式的形成和组织器官的发育,从而揭示模式形成和组织发育的机理。 课题组在生物模式形成和组织器官发育机理探究方面已取得了很多成果, 如基于反应扩散模型仿真实现了细胞的自组织行为, 基于激活抑制反应扩散模型仿真实现了肺气道空间分枝结构。
组内新闻
